H3U中断定长DPIT指令
详细设计
修订记录Chang Record:本文由汇川工程师编写,由Julius_wen发布到燕骏博客
|
版本 Version |
日期 Date |
修改内容及理由 Change and Reason |
拟制人 Author |
审核人Reviewed by |
批准人Approved by |
|
V1.0 |
2016-01-15 |
新建文档,设计指令 |
汇川人 |
||
-
使用注意事项:
-
无;
-
-
特殊寄存器说明
1.脉冲捕捉
2.DVIT指令中断信号
3.DPIT指令中断信号
默认高速输入中断是上升沿中断,可以通过特殊标志(M8140等,如下表)指定下降沿中断。
高速输入使用的标志位:
|
X0 |
X1 |
X2 |
X3 |
X4 |
X5 |
X6 |
X7 |
属性 |
|
M8100 |
M8101 |
M8102 |
M8103 |
M8104 |
M8105 |
M8106 |
M8107 |
SPD增强功能使能标志 |
|
M8080 |
M8081 |
M8082 |
M8083 |
M8084 |
M8085 |
M8086 |
M8087 |
X口脉冲捕捉上升沿使能 |
|
M8090 |
M8091 |
M8092 |
M8093 |
M8094 |
M8095 |
M8096 |
M8097 |
X口脉冲捕捉标志 |
|
M8140 |
M8141 |
M8142 |
M8143 |
M8144 |
M8145 |
M8146 |
M8147 |
X口脉冲捕捉下降沿使能 |
- DPIT最大定长的中断定位指令
概要
启动后,加速到设定的速度段输出频率运行。当检测到中断输入信号后,立即加速或减速到位置段输出频率,并输出设定的脉冲个数;当没有检测到中断输入信号,则输出设定的最大脉冲数。
| DPIT S1 S2 D1 D2 S3 |
最大定长的中断定位 |
适用机型:H1U H2U |
|||
|
S1 |
最大脉冲数 |
S1:设定的最大脉冲输出个数; 16位指令S1+1,32位指令S1+2:设定的中断后位置段脉冲输出个数 |
16位指令(11step) DPIT连续执行 |
32位指令(21step) DDPIT连续执行 |
|
|
S2 |
输出频率 |
S2:设定的中断前脉冲输出频率 16位指令S2+1,32位指令S2+2:设定的中断后脉冲输出频率 |
|||
|
D1 |
输出端口 |
高速脉冲输出端口 | |||
|
D2 |
输出方向 |
脉冲运行方向端口或位变量 | |||
|
S3 |
中断输入 |
中断输入信号端口(范围X0-X7) | |||
操作数
|
操作数 |
位软元件 |
字软元件 |
|||||||||||||||||||||
|
系统·用户 |
系统·用户 |
位数指定 |
变址 |
常数 |
实数 |
||||||||||||||||||
|
S1 |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
|
S2 |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
|
D1 |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
|
D2 |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
|
S3 |
X |
Y |
M |
T |
C |
S |
SM |
D |
R |
T |
C |
SD |
KnX |
KnY |
KnM |
KnS |
KnSM |
V |
Z |
修饰 |
K |
H |
E |
注:带灰色底纹软元件仅对应H3U可编程控制器。
功能和动作说明
该指令是按指定的端口、频率和运行方向输出脉冲。当检测到中断信号后,继续输出给定的脉冲数,令伺服执行机构在当前位置的基础上作偏移量的运动;如果运行过程中未检测到中断信号,则输出设定的最大脉冲数。只有晶体管输出PLC才能使用该指令。其中:
S1 为指定的输出脉冲数,包括最大脉冲数和中断后位置段的脉冲数。16bit指令时,范围是-32768~32,767;32bit指令时,范围是-2,147,483,648~2,147,483,647。其中负号表示反方向;其正负决定了脉冲输出方向。
输出脉冲数,是相对于下面的当前值寄存器作为相对位置:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
D8340 |
D8360 |
D8380 |
D8400 |
D8420 |
当前值寄存器(PLS)(32位) |
|
D8341 |
D8361 |
D8381 |
D8401 |
D8421 |
反转时,当前值寄存器的数值减小。
S2 为指定的中断发生前和中断发生后的输出脉冲频率,16bit指令时,范围为10~32767Hz;32bit指令时,范围为10~200,000Hz;
D1 为脉冲输出端口;可指定Y0/Y1/Y2/Y3/Y4;
D2 运行方向输出端口或位变量,输出为ON状态,表示为正向运行;否则为反向运行。
S4 为指定的中断信号输入端口,可指定X0-X7。
当指令能流为OFF时,将减速停止;此时执行完成标志M8029不会动作;指令驱动接点变为OFF后,减速停止过程中即(脉冲输出中标志处于ON),将不接受指令的再次驱动。当能流由OFF→ON时,脉冲输出处理重新开始;指令执行完毕,M8029标志置为ON;
脉冲输出示意图,如下:

中断发生前的输出脉冲频率和中断发生后的输出脉冲频率可以不同,如下图:

-
注意要点
-
当前脉冲位置,可以监控特殊寄存器;
见下表:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
D8340 |
D8360 |
D8380 |
D8400 |
D8420 |
当前值寄存器(PLS)(32位) |
|
D8341 |
D8361 |
D8381 |
D8401 |
D8421 |
可以监控特殊软元件”脉冲输出停止标志位”,查看脉冲输出状态,脉冲输出中该标志位会被置位,输出完成自动复位。见下表:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
M8340 |
M8360 |
M8380 |
M8400 |
M8420 |
脉冲输出中监控 |
-
仅支持梯形加减速;
-
加减速时间可以单独设置,加减速时间范围10-5000ms。
高速输出轴的最高速度、基底速度、加减速时间等参数可以统一设置,也可以每个轴单独设置。主要通过特殊软元件”单独设置标志位”(M8350, M8370, M8390, M8410, M8430,默认OFF)来设置区分,见下表:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
M8350 |
M8370 |
M8390 |
M8410 |
M8430 |
[定位指令] 加减速时间单独设置和脉冲更改有效 |
当上述”单独设置标志位”OFF,对应的轴参数使用下述寄存器:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
D8500 / D8501 |
最高速度(Hz)(32位) |
||||
|
D8502 |
基底速度(Hz)(16位) |
||||
|
D8503 |
加减速时间(ms)(16位) |
||||
当某一轴”单独设置标志位”ON,该对应的轴参数使用下述寄存器;”单独设置标志位”未设置为ON的轴,仍使用原有寄存器:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
D8342 |
D8362 |
D8382 |
D8402 |
D8422 |
最高速度(Hz)(32位)[默认200000] |
|
D8343 |
D8363 |
D8383 |
D8403 |
D8423 |
|
|
D8347 |
D8367 |
D8387 |
D8407 |
D8427 |
基底速度(Hz)[默认800] |
|
D8348 |
D8368 |
D8388 |
D8408 |
D8428 |
加速时间(ms)[默认100] |
|
D8349 |
D8369 |
D8389 |
D8409 |
D8429 |
减速时间(ms)[默认100] |
-
多段脉冲输出指令运行过程中,加减速计算以第一段为准;当不同频率切换时,加减速斜率(即加减速度)保持不变;
例如,第一段输出频率100kHz,加速时间100ms,第二段输出频率150 kHz,则从第一段加速到第二段,大概50ms。减速也是一样。示意图如下:

-
实际能够输出的最低频率值,即输出的最低基底频率,按照下式计算:

-
通过使能标志位,可以释放高速输出端口资源,从而可以在不需要上一条指令能流无效的情况下,立即启动下一条脉冲输出指令;
需要置位特殊软元件”端口的输出初始化标志位”。见下表:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
M8351 |
M8371 |
M8391 |
M8411 |
M8431 |
端口的输出初始化标志 |
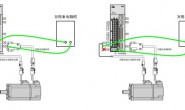
脉冲输出指令运行中,如果指令能流有效,无论脉冲是否发送完成,该指令都会占用该高速输出端口。使用该端口的其他脉冲输出指令,即使能流有效,也不会有脉冲输出(会有端口占用错误报出),因为该高速输出端口资源已被占用。
使能该标志位后,释放该高速输出端口资源,整个用户程序中,下一条能流有效的脉冲输出指令可以启动脉冲输出。
若脉冲输出指令A能流有效,无论脉冲是否发送完成,该指令都会占用该高速输出端口。此时,使用该输出端口的脉冲输出指令B能流即使有效也不会有脉冲输出(因该高速输出端口资源已被指令A占用,而报端口重复或冲突错误)。此时使能该端口的输出初始标志位后,可释放该高速输出端口资源,使用该输出端口的脉冲输出指令B能流有效时有脉冲输出。

如上图所示,M100有效,驱动Y0以1000HZ频率输出20000脉冲。若M100驱动中,用户希望M200设置为ON后,立即启动输出,则如上图所示,SET M8351,M100驱动的高速输出会立即停止,M200驱动的指令抢占高速输出端口Y0,并启动设定的高速输出。
-
脉冲输出完成中断;
需要置位特殊软元件”中断使能标志位”。见下表:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
M8352 |
M8372 |
M8392 |
M8412 |
M8432 |
输出完成中断使能 |
|
Y0输出完成中断 |
Y1输出完成中断 |
Y2输出完成中断 |
Y3输出完成中断 |
Y4输出完成中断 |
对应的中断 |
-
控制脉冲输出停止;
可以通过置位特殊软元件”脉冲输出停止标志位”,立即停止脉冲输出。见下表:
|
Y0 |
Y1 |
Y2 |
Y3 |
Y4 |
属性 |
|
M8349 |
M8369 |
M8389 |
M8409 |
M8429 |
脉冲输出停止标志 |
-
程序举例
 表示中断前输出频率正向20000Hz。运行中检测到X3上升沿中断后,减速到3000Hz,并输出50000个脉冲;如果一直检测不到X3上升沿中断,则一直以20000Hz,输出200000个脉冲;
表示中断前输出频率正向20000Hz。运行中检测到X3上升沿中断后,减速到3000Hz,并输出50000个脉冲;如果一直检测不到X3上升沿中断,则一直以20000Hz,输出200000个脉冲;
转载请注明:燕骏博客 » 汇川技术小型PLC-H3U中断定长DPIT指令
赞赏作者 微信赞赏
微信赞赏 支付宝赞赏
支付宝赞赏