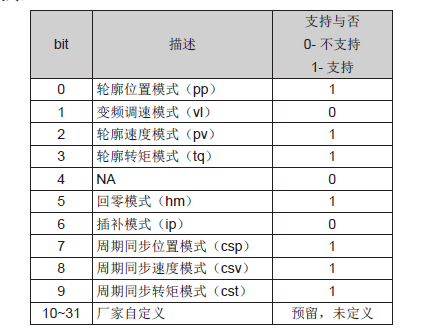
轮廓位置模式(pp)
轮廓速度模式(pv)
轮廓转矩模式(pt)
原点复归模式(hm)
同步周期位置模式(csp)
同步周期速度模式(csv)
同步周期转矩模式(cst)
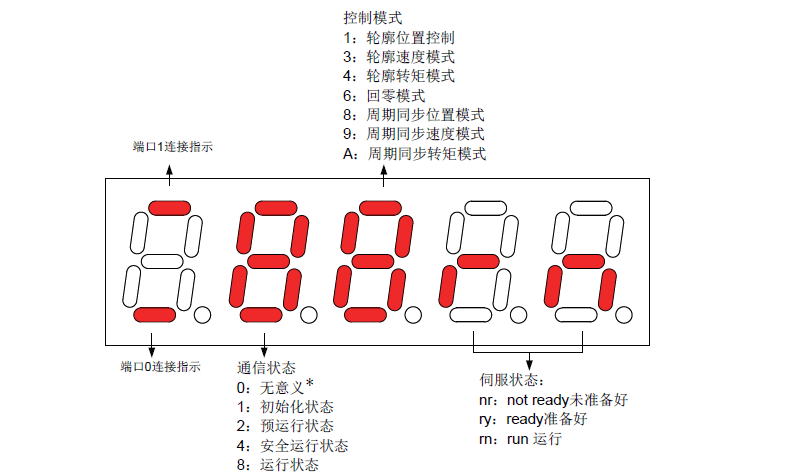
周期同步位置模式:上位机规划位置指令,并通过总线周期性给出指令,伺服驱动器完成定位过程。
周期同步速度模式:上位机规划速度指令,并通过总线周期性给出指令,伺服驱 动器完成速度跟踪。
周期同步转矩模式:上位机规划转矩指令,并通过总线周期性给出指令,伺服驱动器完成转矩输出。
轮廓位置模式:上位机通过总线设定参数,伺服驱动器规划位置指令,并完成定位过程。
轮廓速度模式:上位机通过总线设定参数,伺服驱动器规划速度指令,伺服驱动器完成速度跟踪。
轮廓转矩模式:上位机通过总线设定参数,伺服驱动器规划转矩指令,伺服驱动器完成转矩输出。
原点回归模式:上位机通过参数选择原点回归模式,驱动器自动原点回归。
转载请注明:燕骏博客 » 汇川技术IS620N伺服支持的运行模式
赞赏作者 微信赞赏
微信赞赏 支付宝赞赏
支付宝赞赏