AM600 符合PLCopen 规范,在运动控制系统中,将轴的运行状态分成若干个逻辑状态,而每个逻辑状态直接的转移,需要特定的条件、或指定的MC 运控指令。这样划分处理的好处是便于轴按运动模式分类控制,轴在一个时候只能处于一种逻辑状态,而逻辑状态的转移需要按规则进行,不会因不同MC 的误触发而带来运行的混乱。
轴数据结构变量(Axis.nAxisState) 来指示轴的当前运行状态,该变量Axis.nAxisState 为枚举型变量,共有如下8 种可能状态:
- 0:Power_off(Disabled):轴未上电使能,或未使能,需执行MC_Power 指令
- 1:Errorstop;——————- 先执行MC_Reset/MC_Power 指令
- 2:Stopping;——————– 等待停机操作完成
- 3:Standstill;——————- 轴已停止运行,脱离同步
- 4:Discrete_Motion;——— 轴处于离散运行状态
- 5:Continuous_Motion;—– 轴处于连续运行中
- 6:Synchronized_Motion;— 轴处于同步运行中
- 7:Homing;———————- 轴处于回零运行中,等待归零操作执行完成
轴状态转移图如下,从一个状态转移到另一个状态,需要运行对应的条件,如运行MC 指令,或外部出现了故障,用户无法对其状态进行强制,编程时一定要按照逻辑要求,运行相关的指令:
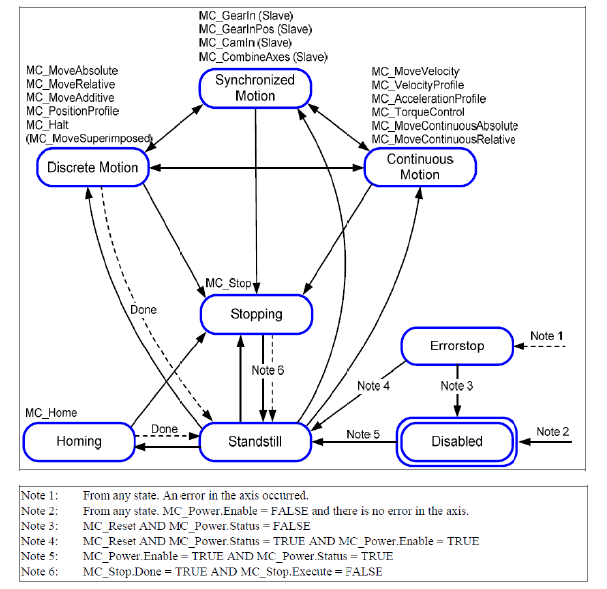
图中的MC 功能块可以使轴状态转移到指定的状态,由图中可以看到:
- 在轴停止状态(Standstill,即 Axis.nAxisState=3)可以转移到各种运行状态;
- 可以由多种状态转移到停止状态(Standstill,即 Axis.nAxisState=3),,
- 若伺服轴出现告警(Errorstop,即 Axis.nAxisState=1),就必需先运行 MC_Reset 指令、MC_Power 指令使
- 轴进入Standstill 状态,才能让轴再次运行;
- 若不按上述转移图方式使用 MC 指令命令轴运动,就不会使轴响应,反而得到 MC 功能块的错误告警信息;
用户程序中,有时需要根据轴的状态,启动后续的控制逻辑,此时依据Axis.nAxisState 的判断,相比于对 MC 功能块的done 信号判断,更为准确可靠。
熟悉上述轴状态图的转移条件,并在编程时,注意MC 指令的使用逻辑和顺序,才能编写出稳定可靠的应用程序。
转载请注明:燕骏博客 » PLCopen中关于轴状态机的规定
赞赏作者 微信赞赏
微信赞赏 支付宝赞赏
支付宝赞赏