AM600 符合PLCopen 规范,在运动控制系统中,将轴的运行状态分成若干个逻辑状态,而每个逻辑状态直接的转移,需要特定的条件、或指定的MC 运控指令。这样划分处理的好处是便于轴按运动模式分类控制,轴在一个时候只能处于一种逻辑状态,而逻辑状态的转移需要按规则进行,不会因不同...
6年前 (2019-01-04) 15751℃ 0评论
15喜欢
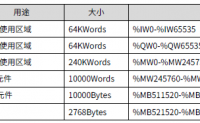
操作数是用户程序中的操作符,动作,功能块或者程序操作的对象,可以作为输入、输出、中间保存结果。在codesys中,常见的操作数包含直接地址、常量和变量。
与其他高级语言类似,codesys也有常量和变量的概念。所谓变量就是数值不变的数;变量是由用户自行定义的标识符。变量的存...
6年前 (2019-01-02) 35761℃ 1评论
16喜欢
编写EtherCAT状态判断功能块,方便以后调用,第一部分代码为变量部分,第二部分代码为主体部分。
Python
//EtherCat通信检测,上电初始配置检测,运行中检测,输出最小掉线站号
FUNCTION_BLO...
6年前 (2019-01-02) 17068℃ 0评论
10喜欢
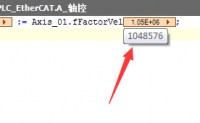
fFactorVel一开始查了一圈,不知道fFactorVel这个到底是什么玩意,找到codesys手册帮助说明看了看,反正是看糊涂了,不知所云:
但是我仿真监控的时候鼠标放到 fFactorVel 上面,发现是一个熟悉的数值1048576.这是20位编码...
6年前 (2018-12-28) 9041℃ 0评论
4喜欢
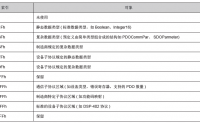
对象字典是设备规范中最重要的部分。它是一组参数和变量的有序集合,包含了设备描述及设备网络状态的所有参数。通过网络可以采用有序的预定义的方式来访问的一组对象。CANopen 协议采用了带有16 位索引和8 位子索引的对象字典,对象字典的结构如下表所示。
CanOpen对象字典...
6年前 (2018-12-27) 8027℃ 0评论
5喜欢
7种运行模式
轮廓位置模式(pp) 轮廓速度模式(pv) 轮廓转矩模式(pt) 原点复归模式(hm) 同步周期位置模式(csp) 同步周期速度模式(csv) 同步周期转矩模式(cst)
周期同步位置模式:上位机规划位置指令,并通过总线周期性给出指令,伺服驱动器完成定...
6年前 (2018-12-26) 11219℃ 0评论
2喜欢
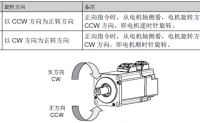
CW/CCW电机旋转方向
前几天还有疑问,伺服的CW/CCW到底是什么鬼。。原来没啥,就是代表电机旋转方向而已,CCW是电机逆时针旋转,CW是顺时针旋转。
CW: CLOCKWISE 的缩写,代表顺时针
CCW:Counter Clockwise的缩写 ,代表逆时...
6年前 (2018-12-26) 31323℃ 0评论
17喜欢
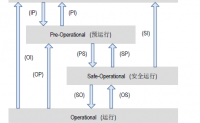
EtherCAT状态机
EtherCAT 设备必须支持4 种状态,负责协调主站和从站应用程序在初始化和运行时的状态关系。 Init:初始化,简写为I; Pre-Operational:预运行,简写为P; Safe- Operational:安全运行,简写为S; Oper...
6年前 (2018-12-26) 7441℃ 0评论
3喜欢
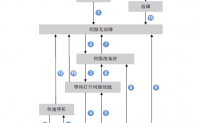
初始化 驱动器初始化、内部自检已经完成。 驱动器的参数不能设置,也不能执行驱动功能。
伺服无故障 伺服驱动器无故障或错误已排除。 驱动器参数可以设置。
伺服准备好 伺服驱动器已准备好。 驱动器参数可以设置。
等待打开伺服使能 伺服驱动器等待打开伺服使...
6年前 (2018-12-26) 10027℃ 0评论
0喜欢
1
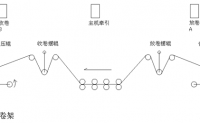
一:系统的结构分析:
多轴凹版印刷是当前印刷工艺中比较成熟的工艺,凹印...
6年前 (2018-12-25) 6780℃ 0评论
6喜欢
H3U应用笔记
说明:该文档是基于当前产品的使用和注意事项,随着产品功能的不断更新,如果现场有遇到新的问题或得到
1 Modbus-TCP访问C200后元件
目前H3U(24303及以前版本)在使...
6年前 (2018-12-25) 18302℃ 0评论
6喜欢
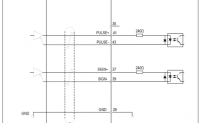
说明:该文档是基于当前对市场端已出现使用经验整理的应用指导 ,由汇川技术工程师总结,由Julius_wen发布
一、伺服驱动器
1.脉冲输入光耦异常问题市场应用指导
1.1 问题背景
市场返回了10台左右同样是脉冲输入异常的IS600P和IS620P驱动器,经检测其...
6年前 (2018-12-25) 20797℃ 0评论
11喜欢
iTune中常见问题说明
本文由汇川技术工程师编写,由Julius_wen发布
响应提不上去,振动报错660
原因:
H0926响应设置过高,而设置的惯量范围比较大(实际惯量比较小时),这时不匹配导致振动,要么报660要么振动抑制不了
实际惯量比较大时,响应...
6年前 (2018-12-25) 4967℃ 0评论
3喜欢
itune操作指导V1.2
本文由汇川技术工程师总结,由Julius_wen发布
相比较V1.1升级点:
H0928和H0929的单位由11.06和10.06及以下版本的1倍单位变更为0.1倍
简述
根据设置的响应等级,不需要其他干预情况下,驱动器会自动抑制振动来获得...
6年前 (2018-12-25) 5889℃ 0评论
1喜欢